[리눅스] sigaction 함수 사용 방법에 대한 쉬운 설명과 사용 예제들
시그널에 대한 더 자세한 내용과 그 외의 많은 정보와 예제를 담은 리눅스 교재를 배포했습니다. 아래의 페이지에서 리눅스 교재를 받아가세요.
https://reakwon.tistory.com/233
리눅스 프로그래밍 note 배포
티스토리에 리눅스에 관한 내용을 두서없이 여지껏 포스팅했었데요. 저도 제 포스팅을 찾기가 어렵기도 하고 티스토리에서 코드삽입을 하게 되면 이게 일자로 쭉 쓰여져있는 x같은 현상이 생겨
reakwon.tistory.com
sigaction을 왜 사용할까?
이전 UNIX의 signal함수보다 더 정교한 작업이 가능한 함수입니다. 그 정교한 작업이라는 게 어떤 것들이 있을까요?
- 정교한 작업1 (sigaction 코드 예제 - 자식 프로세스의 현재 상태 확인)
예를 들어서 자식이 종료하면 자식 프로세스에서 SIGCHLD 신호를 자식 프로세스에서 발생이 됩니다. 그러면 부모프로세스는 자식이 종료하였는지를 알 수 있죠. 그런데 많은 분들은 자식이 종료(EXIT)할때만 SIGCHLD를 발생시키는 것으로 알고 있습니다. 그런데요. 자식 프로세스는 자신이 정지(STOP)되었을 때, 혹은 재개(CONTINUED)되었을 때, 하물며 다른 프로세스에 의해 죽었을때 (KILL) 역시 부모 프로세스에 SIGCHLD를 보내게 됩니다. 우리가 signal 콜만 이용했을 경우 이러한 차이점을 부모 프로세스가 알아서 세세하게 제어할 수가 없습니다. 그런데 sigaction을 그런 차이들을 알아내어 컨트롤이 가능합니다. 이에 대한 예제 코드는 sigaction에 대해서 설명한 이후에 등장합니다.
- 정교한 작업2 (sigaction 코드 예제 - 시그널 함수 구현)
뿐만 아니라 read 시스템 콜이 발생하여 사용자로부터 입력을 기다리고 있는 도중에, 시그널이 발생했다고 가정해보세요. 이럴 경우 시그널 핸들러 수행 이후에 1)read를 다시 호출해서 사용자 입력을 받을까요? 아니면 그냥 read는 넘어가고 다음 코드부터 수행할까요? 이러한 제어는 어떻게 해야하는 건가요? 이렇게 재개를 할지, 말지도 sigaction을 통해서 정할 수 있습니다. 물론 재개할지 말지 정하는 sigaction 사용 예제 코드는 밑에 있습니다.
그전에 이 함수를 알기 위해서는 어느정도 시그널에 대한 기본지식이 있어야합니다. 시그널 집합, 시그널 차단 등의 개념이 나오기 때문인데요. 아래의 포스팅을 통해서 개념을 잡고 오시면 될것 같네요.
https://reakwon.tistory.com/46
[리눅스] 시그널 (SIGNAL)1 시그널 다루기(시그널 핸들러)
시그널 의미전달에 사용되는 대표적인 방법은 메세지와 신호입니다. 메세지는 여러가지 의미를 갖을 수 있지만 복잡한 대신 , 신호는 1:1로 의미가 대응되기 때문에 간단합니다. 컴퓨터에서 신
reakwon.tistory.com
https://reakwon.tistory.com/53
[리눅스] 시그널 (SIGNAL) 2 시그널 함수 sigprocmask, sigfillset, sigemptyset, sigaddset, sigdelset
시그널 관련 함수 지난 시간에는 간단하게 시그널 기본적인 설명과 어떻게 핸들링하는지에 대해서 알아보았죠? 시그널 개념과 시그널 핸들러는 지난 포스팅을 참고하시기 바랍니다. https://reakwo
reakwon.tistory.com
https://reakwon.tistory.com/54
[리눅스] 시그널(Signal) 3 sigpending, sigismember, sigsuspend
시그널에 대해서 이야기하는 3번째 시간이 되겠네요. 지난 번에는 시그널 개념과 시그널 관련함수까지 다루어 봤습니다. 시그널 개념과 시그널 핸들러와 시그널 관련 함수(sigfillset, sigemptyset, s
reakwon.tistory.com
sigaction
이 함수를 이용하면 어느 특정 신호에 관련된 동작을 조회할 수 있고 수정할 수 있습니다. sigaction의 원형은 이렇습니다.
#include <signal.h>
int sigaction(int signum, const struct sigaction *act,
struct sigaction *oldact);
사용하기 위해서는 signal.h 헤더 파일을 include시켜줘야합니다.
▶ signum : signum은 시그널 번호를 의미합니다. signal함수의 처음 인자와 같습니다. 이런거 있잖아요. SIGINT, SIGQUIT 같은 시그널 번호말이죠. 단, 제어불가한 신호 번호는 SIGKILL과 SIGSTOP입니다.
▶ act : sigaction 구조체인 act 인자는 signum에 대해서 어떤 동작을 취할지에 대한 정보를 담고 있습니다. 즉, 시그널에 대한 동작을 수정하는 정보입니다.
▶ oact : 역시 sigaction구조체인데, 이전에 설정된 동작에 대해서 돌려줍니다. 즉, 시그널에 대한 동작을 조회하는 정보입니다.
sigaction의 구조체를 한번 볼까요?
struct sigaction {
void (*sa_handler)(int);
void (*sa_sigaction)(int, siginfo_t *, void *);
sigset_t sa_mask;
int sa_flags;
void (*sa_restorer)(void);
};
- sa_handler : 앞서 signum에 대한 동작을 나타내는 함수의 포인터입니다. 설정되지 않으면 기본동작을 의미하는 SIG_DFL입니다.
- sa_sigaction : sa_flags로 SA_SIGINFO를 사용할때 설정할 수 있습니다. 이런 경우에는 sa_handler가 사용되지 않고 이 sa_sigaction이 대신 사용됩니다. sa_sigaction에서는 신호 처리부(신호를 처리하는 함수)에 두가지 정보를 더 담아서 보냅니다. siginfo_t와 프로세스 문맥의 식별자가 그것입니다.
- 가장 처음 int는 시그널 번호입니다.
- siginfo_t는 시그널에 대한 부가적인 정보를 담은 구조체입니다. 어떤 정보를 포함하는지는 이 구조체를 참고하면 됩니다. 시그널 정보에 많은 정보들이 들어가기 때문에 필드가 많으니 리눅스 메뉴얼을 참고하시기 바래요! 짧막하게 보면 아래와 같은 정보가 들어갈 수 있습니다.
- 이후 void* 는 커널이 저장해둔 signal context의 정보를 담습니다.
siginfo_t {
int si_signo; /* Signal number */
int si_errno; /* An errno value */
int si_code; /* Signal code */
int si_trapno; /* Trap number that caused
hardware-generated signal
(unused on most architectures) */
pid_t si_pid; /* Sending process ID */
uid_t si_uid; /* Real user ID of sending process */
int si_status; /* Exit value or signal */
clock_t si_utime; /* User time consumed */
clock_t si_stime; /* System time consumed */
…
}- sa_mask : 차단할 신호의 집합입니다. sigprocmask를 통해서 특정 신호를 BLOCK 시킬지, 말지를 정합니다.
- sa_flags : 신호 옵션들입니다. 아래와 같은 옵션들이 존재합니다.
| SA_NOCLDSTOP | signum이 SIGCHLD인 경우 자식 프로세스가 정지되었을때, notification을 받지 않습니다. 자식이 SIGSTOP, SIGTSTP, SIGTTIN, SIGTTOU 신호를 받아 정지되었을때 신호를 안받는다는 겁니다. |
| SA_NOCLDWAIT | signum이 SIGCHLD일때, 자식 프로세스가 종료되었을때 시스템이 좀비프로세스를 만들지 않게 합니다. |
| SA_NODEFER | 신호가 잡혀서 신호 처리 함수가 실행되는 도중에 다시 같은 신호가 발생됐을때, 시스템이 자동으로 차단하지 않습니다. |
| SA_ONSTACK | sigaltstack으로 대체 스택을 선언해두었다면 신호가 대안 스택의 프로세스에 전달됩니다. |
| SA_RESETHAND | 신호 처리 함수에 진입할때 이 신호의 처리 방식을 SIG_DFL로 재설정하고 SA_SIGINFO 플래그를 지웁니다. |
| SA_RESTART | interrupt된 시스템 콜 호출이 자동으로 재시작됩니다. 아래 예에서 보겠습니다. |
| SA_RESTORER | 어플리케이션에서 사용할 의도로 만들어진 flag가 아닙니다. sa_restorer와 관련된 옵션입니다. |
| SA_SIGINFO | 신호 처리부에 추가적인 두가지 정보를 전달합니다. 이때 sa_sigaction함수 포인터를 설정해야합니다. 위의 sa_sigaction 인자에 대한 설명을 참고하세요. |
- sa_restorer : 이 필드는 앱 사용 목적으로 만들어진 필드가 아닙니다. sigreturn과 관련된 필드라고 하네요. 넘어가겠습니다.
sigaction 코드 예제 - 자식 프로세스의 현재 상태 확인
시그널 핸들러를 이용해서 자식 프로세스가 종료하여 SIGCHLD를 발생했을 때 wait을 호출해서 자식 프로세스의 종료 상태를 알 수 있습니다. 그런데 자식 프로세스의 종료뿐만 아니라 정지, 재개 상태로 바뀌었을 때도 이러한 SIGCHLD를 발생시킨다고 했었습니다. 그렇다면 자식 프로세스가 종료할 경우에만 딱 wait할 수 있는 방법이 있을까요?
SA_SIGINFO 플래그와 siginfo_t의 si_code를 이용하면 됩니다.
//sigchld_info.c
#include <signal.h>
#include <unistd.h>
#include <stdio.h>
#include <sys/wait.h>
#include <stdlib.h>
void action(int signo, siginfo_t *info, void* context){
if(signo == SIGCHLD){
printf("pid:%d, uid:%d\n", info->si_pid, info->si_uid);
if(info->si_code == CLD_EXITED){
pid_t child_process = wait(NULL);
printf("[parent] child process(%d) exit\n", child_process);
exit(0);
}
if(info->si_code == CLD_KILLED){
pid_t child_process = wait(NULL);
printf("[parent] child process(%d) killed\n", child_process);
exit(1);
}
if(info->si_code == CLD_STOPPED)
printf("[parent] child process stopped\n");
if(info->si_code == CLD_CONTINUED)
printf("[parent] child process continued\n");
}
}
int main(){
pid_t pid;
struct sigaction act;
act.sa_flags = SA_SIGINFO;
act.sa_sigaction = action;
if((pid = fork()) < 0){
printf("fork error \n");
return 1;
} else if(pid == 0){ //child process
int count = 0;
while(count < 30) {
printf("\t[child] count:%d\n", count++);
sleep(1);
}
exit(0);
} else { //parent process
printf("[parent] child process : %d\n", pid);
sigaction(SIGCHLD, &act, NULL);
while(1) pause();
}
}sigaction 구조체에 SA_SIGINFO를 이용해서 sa_sigaction 핸들러를 활용합니다. SA_SIGINFO를 사용하게 되면 sa_sigaction을 사용할 수 있다고 위 설명해서 말씀드렸죠?
struct sigaction act;
act.sa_flags = SA_SIGINFO;
act.sa_sigaction = action;action 함수에서 siginfo_t의 si_code는 SIGCHLD 신호가 발생했을 때 부가적인 정보가 담겨져있습니다. 그래서 보다 정교한 제어를 하게 됩니다.
void action(int signo, siginfo_t *info, void* context)30초간 자식의 상태를 바꿀 수 있습니다. Kill 명령어를 통해서 정지, 재개를 해보세요. 그리고 kill -SIGKILL을 통해서 비정상 종료도 해보시면 자식 프로세스의 상태를 더 자세히 확인할 수 있습니다.
| terminal1 | terminal2 |
| # ./a.out [parent] child process : 236739 ... [child] count:6 pid:236739, uid:0 [parent] child process stopped pid:236739, uid:0 [parent] child process continued [child] count:7 [child] count:8 ... [child] count:29 pid:236739, uid:0 [parent] child process(236739) exit |
# kill -SIGTSTP 236739 # kill -SIGCONT 236739 |
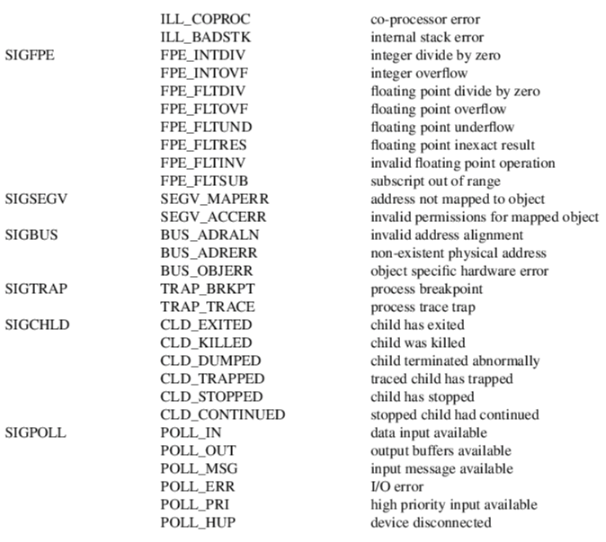
si_code의 값은 발생한 시그널에 따라서 다르게 설정이 됩니다. 아래의 표를 참고하시기 바랍니다.
sigaction 코드 예제 - 시그널 함수 구현
아래는 sigaction함수를 통해서 signal함수를 흉내낸 코드입니다.
#include <stdio.h>
#include <signal.h>
#include <unistd.h>
typedef void Sigfunc(int);
Sigfunc* my_signal(int signo, Sigfunc *func){
struct sigaction act,oact;
act.sa_handler = func;
sigemptyset(&act.sa_mask);
act.sa_flags = 0;
if(sigaction(signo, &act, &oact) < 0)
return SIG_ERR;
return oact.sa_handler;
}
void sig_int(int signo){
printf("sig_int start\n");
}
int main(){
Sigfunc* origin;
//그전의 신호 처리 함수 포인터가 origin에 저장됨. 지금은 SIG_DFL
origin = my_signal(SIGINT, sig_int);
printf("main start\n");
//신호가 발생할때까지 대기
pause();
printf("main end\n");
}main start
^Csig_int start <-- Ctrl+C 입력
main end
뭔가 되는것같긴한데 문제점이 있습니다. 아래와 같이 main함수를 변경해봅시다.
int main(){
int n;
char buf[64];
my_signal(SIGINT,sig_int);
if((n=read(0,buf,64)) < 0){
printf("read failed\n");
}else{
printf("%s\n",buf);
}
}
그리고 실행시켜보면 읽기가 실패했습니다. read하는 도중에 Ctrl+C를 눌러서 신호를 발생시켰고, 그때문에 신호 처리함수가 호출이 되었습니다. 이때 read는 interrupt되었지만, 다시 복구 되지 않고 있는 현상이 문제입니다.
^Csig_int start <-- Ctrl + C 입력
read failed그래서 SA_RESTART 플래그를 넣어서 시스템 콜이 재시작되도록 설정합니다.
Sigfunc* my_signal(int signo, Sigfunc *func){
//... 중략
act.sa_flags = 0;
act.sa_flags |= SA_RESTART;
//... 중략
}이후의 실행은 아래와 같습니다.
hello^Csig_int start <-- Ctrl + C 입력
world
world
hello를 입력하는 와중에 Ctrl+C를 입력시켜서 SIGINT신호를 발생시켰습니다. 그래서 sig_int start라는 출력문이 수행이되었고, 신호 처리 함수가 끝난 후 다시 read를 하게 됩니다. world를 출력하고 엔터를 치면 world만 출력이 되네요.
다시 read를 호출했기 때문입니다.
지금까지 sigaction에 대한 설명과 sigaction을 활용한 예제 2가지를 보았습니다.